Hari Senin pagi 29 Oktober 2018, kita dikejutkan dengan jatuhnya pesawat Lion Air JT610. Pesawat Boeing yang relatif masih baru, jatuh di Laut Karawang, Jawa Barat. Seluruh penumpang dan awak pesawat, dengan total 186 orang, 1 anak-anak dan 2 bayi dipastikan meninggal dunia. Harapan keluarga korban adalah ditemukannya jasad anggota keluarga mereka, untuk dapat dibawa pulang dan dikebumikan.
Pencarian sisa bangkai pesawat langsung dilakukan oleh Basarnas dengan dukungan berbagai pihak di antaranya TNI AL, Hidros, BPPT, Pertamina, nelayan dan pihak-pihak lain. Kapal dengan berbagai peralatan canggih diterjunkan untuk mencari bangkai pesawat, karena diperkirakan masih banyak korban yang terjebak didalamnya. Selain itu penemuan black box sangat diharapkan untuk keperluan investigasi yang menyebabkan jatuhnya pesawat.
Kondisi perairan tempat jatuhnya pesawat tersebut kurang lebih pada kedalaman 35m. Pada kedalaman tersebut tentunya masih bisa dijangkau oleh penyelam. Sebab posisi pesawat yang belum jelas, diperlukan peralatan untuk memperkirakan keberadaan pesawat di dasar laut. Peralatan tersebut antara lain:
- Side Scan Sonar (SSS)
Perangkat/alat SONAR (Sound NAvigation Ranging) biasa dikenal dengan nama SSS, yang berbentuk seperti rudal kecil dengan panjang sekitar 1 meter, seukuran pralon PVC 4”. Posisi ideal towfish SSS ketika ditowing adalah mendekati permukaan dasar laut, 10% dari kedalaman air. Jadi semakin dalam suatu lokasi maka kabel winch yang digunakan untuk menarik towfish akan semakin panjang. Sebab bila kabelnya pendek, posisi towfish akan melayang mendekati permukaan air. Kabel winch selain digunakan untuk menarik towfish, juga digunakan untuk mengirimkan data dari towfish ke perangkat dan monitor komputer yang ada di atas kapal.
Prinsip kerja dari SSS adalah towfish SSS memancarkan energi ultrasonik dengan frekwensi 100 kHz (dengan opsi 500 kHz). Sinyal yang dikirim tersebut akan diterima oleh permukaan dasar laut (seabed feature) dan benda-benda yang ada di atas permukaan dasar laut. Selanjutnya sinyal tersebut akan dipantulkan kembali ke towfish. Data yang diterima dari towfish ditampilkan pada layar monitor komputer menyerupai foto permukaan dasar laut yang berwarna/berona keabu-abuan. Benda-benda yang ada di atas permukaan dasar laut pun juga bisa diinterpretasi bentuknya dengan jelas. Misalnya pesawat, pipa minyak, kapal karam (ship-wreck), dan benda lainnya di permukaan dasar laut.
SSS dapat melakukan survei pada kisaran 200m di samping kanan-kiri kapal pada satu jalur survei. Kecepatan kapal yang ideal adalah 3-4 knot, karena apabila lebih cepat, towfish akan melayang mendekati permukaan air laut dan data menjadi jelek atau noise. Posisi towfish dioffset dari posisi antena GPS yang ada di kapal. Tiap jarak tertentu, misalnya 100m akan diberikan posisi GPS pada data SSS, sehingga memudahkan ketika melakukan interpretasi. SSS merupakan survei pendahuluan, sebelum penyelam diterjunkan.

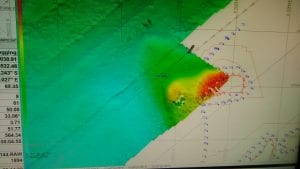
- Multibeam Echo-Sounders (MBES)
Prinsip kerja MBES sama dengan prinsip kerja Echo-Sounder (alat untuk memetakan kedalaman perairan). Bedanya, data MBES bukan titik tapi area, karena ketika running survey, data dari tranducer MBES berupa sweep (sapuan). Jadi area yang terkover cukup luas. Data MBES berupa angka kedalaman, namun jumlahnya sangat banyak. Apabila ada objek dipermukaan dasar laut, maka objek tersebut akan dapat tergambar dengan jelas. MBES memiliki resolusi vertikal 10cm, artinya beda tinggi 10 cm akan dapat dipetakan. Badan pesawat yang mencapai panjang dan lebar puluhan meter akan dapat tergambar, dan posisinya dipermukaan dasar laut, akan menyebabkan kedalaman menjadi bervariasi. Variasi kedalaman ini akan ditampilkan dengan angka-angka dengan gradasi warna, sehingga dapat membentuk gambar pesawat.
- Remotely Operated Vehicle (ROV)
ROV merupakan alat yang lebih dikenal sebagai robot bawah laut yang dilengkapi dengan kamera/video. Alat ini dioperasikan oleh pilot ROV dari deck kapal. Alat ini dapat menjangkau kedalaman yang tidak dapat dijangkau oleh penyelam. ROV yang dilengkapi dengan beacon USBL (semacam GPS tapi dipakai di dalam air) dapat mengirimkan posisinya ke monitor komputer yang ada di deck kapal.
Sehingga data posisi dan gambar kondisi objek (pesawat) yang ada di dasar laut bisa diketahui dari atas kapal. Untuk perairan yang gelap ROV tidak dapat bekerja dengan maksimal, karena kamera videonya tidak dapat menembus kegelapan perairan.
Apabila alat-alat tersebut bekerja dengan baik, maka posisi (sisa) pesawat akan lebih mudah ditemukan. Titik koordinat yang akurat yang menunjukkan posisi korban, akan memudahkan tim penyelam untuk melakukan evakuasi korban.

Bekti Sukirman, M.Sc.
Hydrographic Surveyor,
Dosen Tidak Tetap Teknik Kelautan, ITY